About
IUPUI has worked on the development of multiple datasets, participated in various workshops, and wrote a variety of papers. More information is provided on these topics below.
|
 |
|---|



IUPUI has worked on the development of multiple datasets, participated in various workshops, and wrote a variety of papers. More information is provided on these topics below.
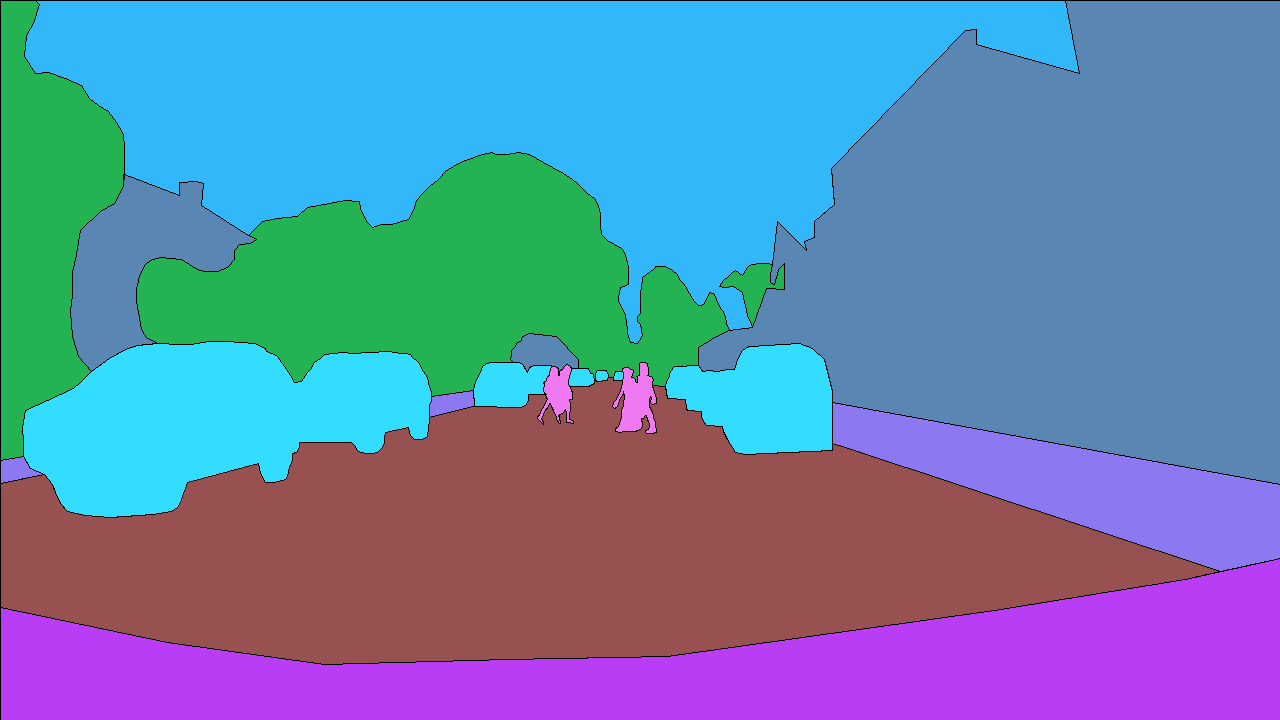
Prediction of pedestrian behavior is critical for fully autonomous vehicles to drive in busy city streets
safely and
efficiently. The future autonomous cars need to fit into mixed conditions with not only technical but
also social
capabilities. It is important to estimate the temporal-dynamic intent changes of the pedestrians,
provide explanations
of the interaction scenes, and support algorithms with social intelligence.
The IUPUI-CSRC Pedestrian Situated Intent (PSI) benchmark dataset has two innovative labels besides
comprehensive
computer vision annotations. The first novel label is the dynamic intent changes for the pedestrians to
cross in front
of the ego-vehicle, achieved from 24 drivers with diverse backgrounds. The second one is the text-based
explanations of
the driver reasoning process when estimating pedestrian intents and predicting their behaviors during
the interaction
period. These innovative labels can enable computer vision tasks like pedestrian intent/behavior
prediction,
vehicle-pedestrian interaction segmentation, and video-to-language mapping for explainable algorithms.
The dataset also
contains driving dynamics and driving decision-making reasoning explanations.
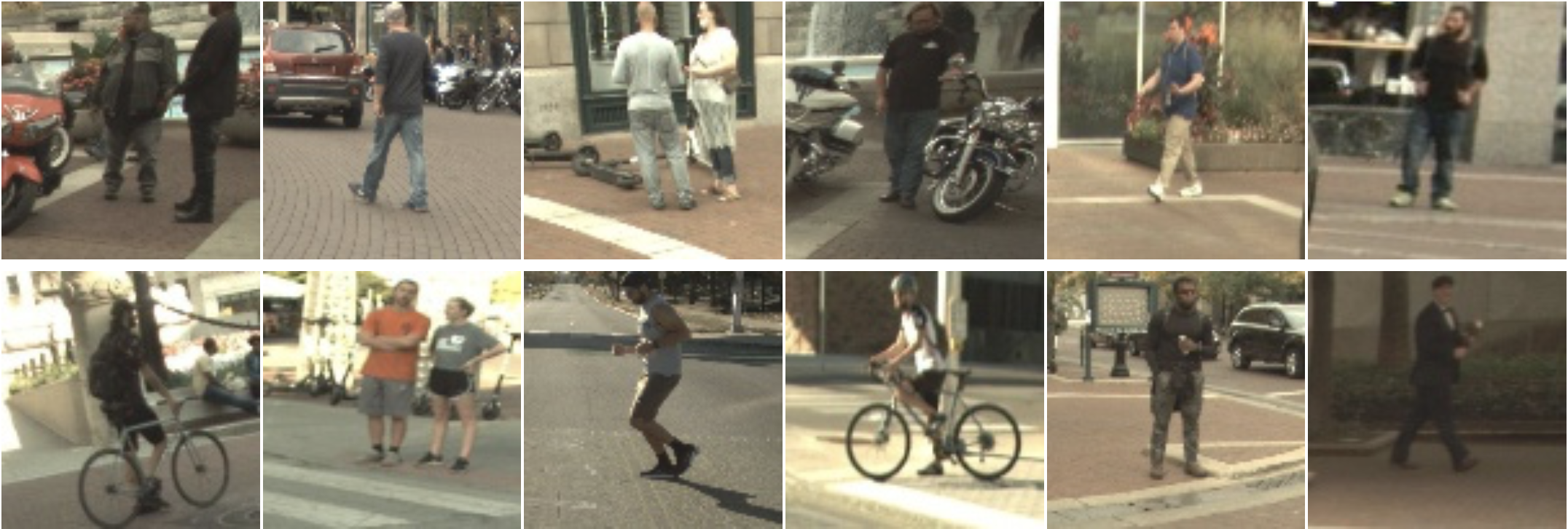
situated-intent.net/e-scooter_dataset/
E-scooters have become ubiquitous vehicles in major cities around the world. The numbers of e-scooters
keep
escalating, increasing their interactions with other cars on the road. Compared to traditional
vulnerable road
users, like pedestrians and cyclists, e-scooter riders not only have different appearances but also
behave and
move differently. This situation creates new challenges for vehicle active safety systems and automated
driving
functionalities.
Detection is the first step for intelligent systems and AI algorithms to mitigate the potential
conflicts with
e-scooter riders. In this project, we propose a small benchmark dataset for e-scooter rider detection
task, and
a trained model to support the detection of e-scooter riders from RGB images collected from natural road
scenes.
The dataset contains equal number of cropped images of e-scooter riders and other vulnerable road users.
For the
e-scooter rider detector, we propose an efficient pipeline built over two existing state-of-the-art
convolutional neural networks (CNN), You Only Look Once (YOLOv3) and MobileNetV2. We fine-tune
MobileNetV2 over
our dataset and train the model to classify e-scooter riders and pedestrians. We obtain a recall of
around 0.75
on our raw test sample to classify e-scooter riders with the whole pipeline. Moreover, the
classification
accuracy of trained MobileNetV2 on top of YOLOv3 is over 91%, with precision and recall over 0.9.
With the progress of automated driving technologies, self-driving cars are driving safely on highways and
freeways in
most circumstances. However, the lack of safe and smooth interactions with pedestrians becomes one of
the
significant
obstacles preventing fully autonomous vehicles in city streets. Protections of vulnerable road users
like
pedestrians
are of the highest priority in traffic safety, and crashes with pedestrians will significantly impact
the trust
and
public attitudes towards the new mobility technology. Disruptive interactions with pedestrians may also
lower
both the
riding experiences and driving efficiency in the pedestrian-rich road environments. It is vital to
understand
pedestrians and make motion planning based on the predictions of their behaviors.
Besides pedestrian detection and tracking, many research efforts have been put into recognizing
pedestrians'
behaviors
and predicting their trajectories in the past few years. The achievements can predict potential crashes
and make
motion-planning decisions accordingly in a longer duration. This workshop will focus on the detection,
recognition, and
prediction of pedestrian behaviors for automated driving cars to interact with them smoothly. The goal
is to
build a
platform for sharing state-of-the-art models, algorithms, and datasets in the field and identifying
research
needs and
directions.